BEARING
A bearing is
a machine element that constrains relative motion to the desired
motion, and reduces friction between moving parts. The design of
the bearing may, provide for free linear movement of the moving part
or for free rotation around a fixed axis or, it may prevent a motion by controlling
the vectors of normal forces that bear on the moving parts.
Most bearings facilitate the desired motion by minimizing friction.
Types of Bearing
Bearings are classified broadly according to the type of
operation, the motions allowed, or to the directions of the loads applied to
the parts.
1. ROLLING BEARING
A rolling bearing
is a bearing which carries a load by placing rolling elements such as
balls or rollers between two bearing rings called races. The relative
motion of the races (Outer race and inner race) causes the rolling elements
to roll with very little rolling resistance and with little sliding.
Rolling-element bearings have the advantage of a good
trade-off between cost, size, weight, carrying capacity, durability, accuracy,
friction, and so on.
There are two types of Rolling bearing
(I) Ball Bearing
(II) Roller Bearing
(I) BALL BEARING
A ball bearing is
a type of rolling-element bearing that uses balls to
maintain the separation between the bearing races.
The purpose of a ball bearing is to reduce rotational friction and
support radial and axial loads. It achieves this by using
at least two races to contain the balls and transmit the loads through the
balls. In most applications, one race is stationary and the other is attached
to the rotating assembly like a hub or shaft. As one of the bearing
races rotates it causes the balls to rotate as well. Because the balls are
rolling they have a much lower coefficient of friction than if two flat
surfaces were sliding against each other.
Ball bearings tend to have lower load capacity for their size
than other kinds of rolling-element bearings due to the smaller contact area
between the balls and races. However, they can tolerate some misalignment of
the inner and outer races.
There are FOUR types of ball Bearing
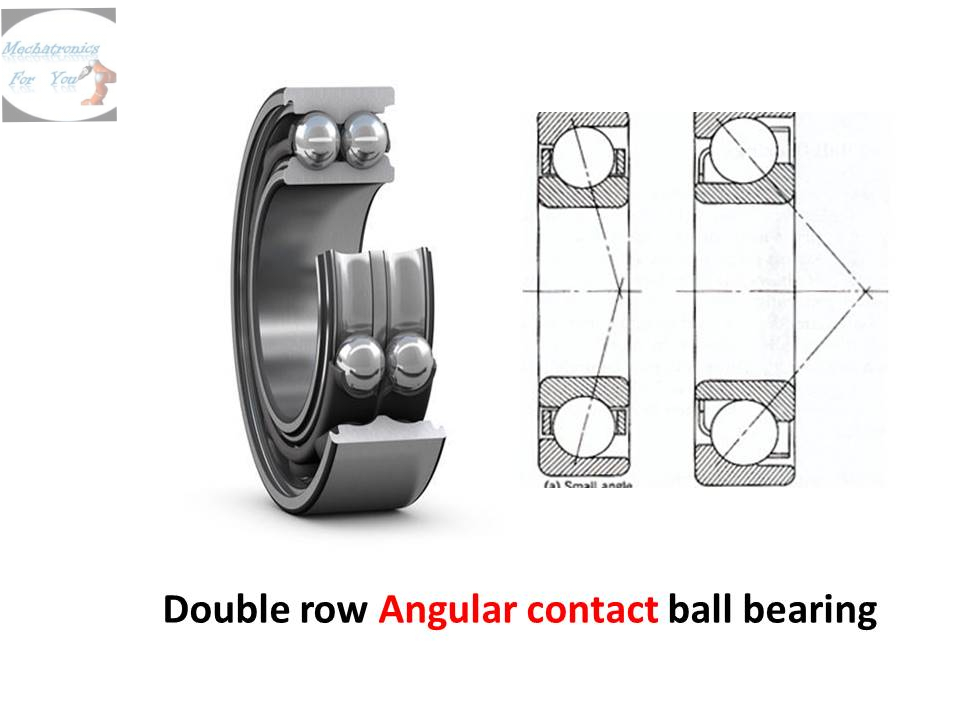
a. Angular contact Ball bearing
An angular
contact ball bearing uses axially asymmetric races. An
axial load passes in a straight line through the bearing, whereas a radial load
takes an oblique path that acts to separate the races axially. So the angle of
contact on the inner race is the same as that on the outer race. Angular
contact bearings better support combined loads (loading in both the radial and
axial directions) and the contact angle of the bearing should be matched to the
relative proportions of each. The larger the contact angle (typically in the
range 10 to 45 degrees), the higher the axial load supported, but the lower the
radial load. In high speed applications, such as turbines, jet engines, and dentistry
equipment, the centrifugal forces generated by the balls changes the contact
angle at the inner and outer race.
b. Deep groove ball bearing
Deep groove ball bearings are the most widely used
bearing type and are particularly versatile. They have low friction and are
optimized for low noise and low vibration which enables high rotational speeds.
They accommodate radial and axial loads in both directions, are easy to mount,
and require less maintenance than other bearing types.
c. Self aligning ball bearing
Self-aligning ball bearings are constructed with the inner
ring and ball assembly contained within an outer ring that has a spherical
raceway. This construction allows the bearing to tolerate a small angular
misalignment resulting from shaft or housing deflections or improper mounting.
The bearing was used mainly in bearing arrangements with very long shafts, such
as transmission shafts in textile factories. One drawback of the
self-aligning ball bearings is a limited load rating, as the outer raceway has
very low osculation.
d. Thrust bearing
Thrust ball bearings,
composed of bearing balls supported in a ring, can be used in low
thrust applications where there is little axial load.
Thrust bearings absorb axial loads
from rotating shafts into the stationary housings or mounts in which they are
turning. Axial loads
are those transmitted linearly along the shaft. Good examples of axial loads are the forward thrust on boats or prop-driven
airplanes as a result of their propeller's rapid rotation.
(II) ROLLER BEARING
Common roller bearings use cylinders of slightly greater length than
diameter. Roller bearings typically have higher radial load capacity than ball
bearings, but a lower capacity and higher friction under axial loads. If the
inner and outer races are misaligned, the bearing capacity often drops quickly
compared to either a ball bearing or a spherical roller bearing.
As in all radial bearings, the outer load is continuously re-distributed
among the rollers. Often fewer than half of the total number of rollers carry a
significant portion of the load.
There are FOUR types of roller
bearing
a. Taper roller bearing
Tapered roller bearings use conical rollers that
run on conical races. Most roller bearings only take radial or axial loads, but
tapered roller bearings support both radial and axial loads, and generally can
carry higher loads than ball bearings due to greater contact area. Tapered
roller bearings are used, for example, as the wheel bearings of most wheeled
land vehicles. The downsides to this bearing is that due to manufacturing
complexities, tapered roller bearings are usually more expensive than ball
bearings; and additionally under heavy loads the tapered roller is like a wedge
and bearing loads tend to try to eject the roller; the force from the collar
which keeps the roller in the bearing adds to bearing friction compared to ball
bearings.
b. Spherical roller bearing
Spherical roller bearings have an outer ring with
an internal spherical shape. The rollers are thicker in the middle and thinner
at the ends. Spherical roller bearings can thus accommodate both static and
dynamic misalignment. However, spherical rollers are difficult to produce and
thus expensive, and the bearings have higher friction than an ideal cylindrical
or tapered roller bearing since there will be a certain amount of sliding
between rolling elements and rings.
c. Cylindrical roller bearing
Cylindrical rollers are in linear contact with the
raceways. They have a high radial load capacity and are suitable for high
speeds.
Some cylindrical roller bearings have no ribs on
either the inner or outer ring, so the rings can move axially relative to each
other. These can be used as free-end bearings. Cylindrical roller bearings, in
which either the inner or outer rings has two ribs and the other ring has one,
are capable of taking some axial load in one direction Double-row cylindrical
roller bearings have high radial rigidity and are used primarily for precision
machine tools.
d. Needle roller bearing
Needle roller bearings use very long and thin
cylinders. Often the ends of the rollers taper to points and these are used to
keep the rollers captive, or they may be hemispherical and not captive but held
by the shaft itself or a similar arrangement. Since the rollers are thin, the outside
diameter of the bearing is only slightly larger than the hole in the middle.
However, the small-diameter rollers must bend sharply where they contact the
races, and thus the bearing fatigues relatively quickly.
2. FLUID BEARING
Fluid bearings are bearings in which
the load is supported by a thin layer of rapidly moving pressurized liquid or
gas between the bearing surfaces. Since there is no contact between the
moving parts, there is no sliding friction, allowing fluid bearings to
have lower friction, wear and vibration than many other types of bearings.
Thus, it is possible for some fluid bearings to have near-zero wear if operated
correctly.
Fluid bearings are frequently used in high
load, high speed or high precision applications where ordinary ball
bearings would have short life or cause high noise and vibration. They are
also used increasingly to reduce cost. For example, hard disk drive motor
fluid bearings are both quieter and cheaper than the ball bearings they
replace. Applications are very versatile and may even be used in complex
geometries such as lead screw.
They can be broadly classified
into two types: hydrostatic bearings and hydrodynamic bearings.
Hydrostatic bearing
Hydrostatic bearings are externally pressurized
fluid bearings, where the fluid is usually oil, water or air, and the
pressurization is done by a pump.
Hydrodynamic bearing
Hydrodynamic bearings rely on the high speed of the journal (the part of the shaft resting on the fluid)
to pressurize the fluid in a wedge between the faces.
3. PLAIN BEARING
A plain bearing, or more commonly sliding
bearing and slide bearing in railroading sometimes called
a solid bearing, journal bearing, or friction bearing, is the
simplest type of bearing, comprising just a bearing surface and
no rolling elements. Therefore, the journal (i.e., the part of
the shaft in contact with the bearing) slides over the bearing
surface. The simplest example of a plain bearing is a shaft rotating in a hole.
A simple linear bearing can be a pair of flat surfaces designed to allow
motion; e.g., a drawer and the slides it rests on or the ways on the bed of
a lathe.
Plain bearings, in general, are
the least expensive type of bearing. They are also compact and lightweight, and
they have a high load-carrying capacity.
4. MAGNETIC BEARING
A magnetic bearing is a type of bearing that
supports a load using magnetic levitation. Magnetic bearings support
moving parts without physical contact. For instance, they are able to levitate
a rotating shaft and permit relative motion with very low friction
and no mechanical wear. Magnetic bearings support the highest speeds of any
kind of bearing and have no maximum relative speed.
Active magnetic bearings have several
advantages: they do not suffer from wear, have low friction, and can often
accommodate irregularities in the mass distribution automatically, allowing
rotors to spin around their center of mass with very low vibration.
Passive magnetic bearings use
permanent magnets and, therefore, do not require any input power but are
difficult to design due to the limitations.
An active magnetic bearing works on the principle
of electromagnetic suspension based on the induction of eddy
currents in a rotating conductor. When an electrically conducting
material is moving in a magnetic field, a current will be
generated in the material that counters the change in the magnetic field (known
as Lenz's Law). This generates a current that will result in a magnetic
field that is oriented opposite to the one from the magnet. The
electrically conducting material is thus acting as a magnetic mirror.
The hardware consists of an electromagnet assembly,
a set of power amplifiers which supply current to the electromagnets, a controller,
and gap sensors with associated electronics to provide the feedback required to
control the position of the rotor within the gap. The power amplifier supplies
equal bias current to two pairs of electromagnets on opposite sides of a rotor.
This constant tug-of-war is mediated by the controller, which offsets the bias
current by equal and opposite perturbations of current as the rotor deviates
from its center position.
5. JEWEL BEARING
A jewel bearing is a plain bearing in which
a metal spindle turns in a jewel-lined pivot hole.
The hole is typically shaped like a torus and is slightly
larger than the shaft diameter. The jewels are typically made from the mineral corundum,
usually either synthetic sapphire or synthetic
ruby. Jewel bearings are used in precision instruments where low friction, long
life, and dimensional accuracy are important. Their largest use is in mechanical
watches.
The advantages of jewel bearings include high
accuracy, very small size and weight, low and predictable friction, good
temperature stability, and the ability to operate without lubrication and in
corrosive environments. They are known for their low kinetic
friction and highly consistent static friction.
6. FLEXURE BEARING
A flexure bearing is a category of flexure which
is engineered to be compliant in one or more angular degrees of freedom.
Flexure bearings are often part of compliant mechanisms. Flexure bearings
serve much of the same function as conventional bearings or hinges in
applications which require angular compliance. However, flexures require no
lubrication and exhibit very low or no friction.
Many flexure bearings are made of
a single part: two rigid structures joined by a thin "hinge" area. A
hinged door can be created by implementing a flexible element between a door
and the door frame, such that the flexible element bends allowing the door to
pivot open.
Flexure bearings have the advantage over most other
bearings that they are simple and thus inexpensive. They are also often
compact, lightweight, have very low friction, and are easier to repair without
specialized equipment. Flexure bearings have the disadvantages that the range
of motion is limited, and often very limited for bearings that support high
loads.